工业机器人装调维修基础 100页PPT详解维修通用机械及零部件
工业机器人作为现代制造业的核心装备,其稳定运行离不开专业的装调与维修。本系列PPT共100页,系统讲解了工业机器人维修中涉及的通用机械及零部件基础知识,旨在为技术人员提供一套实用的参考指南,建议收藏并逐步深入学习。
一、工业机器人机械系统概述
工业机器人的机械系统是执行精确运动的基础,通常由机身、臂部、腕部和末端执行器组成。其核心机械部件包括关节、连杆、减速器、轴承和传动装置等。理解这些部件的结构、功能及相互关联,是进行有效维修的前提。例如,关节通常采用精密轴承支撑,并配合谐波减速器或RV减速器实现高精度传动,任何部件的磨损或失调都可能导致机器人定位不准或产生异响。
二、通用机械零部件维修基础
1. 轴承的检查与更换
轴承是机器人关节中的关键支撑元件。维修时需检查其游隙、磨损和润滑情况。常见故障包括因疲劳或污染导致的点蚀、剥落。更换时需使用专用工具,确保安装精度,并选用合适的润滑脂,如锂基脂或合成油脂,以延长使用寿命。
2. 减速器的维护与故障诊断
减速器(特别是谐波减速器和RV减速器)负责传递动力并降低转速。维修要点包括:定期检查油封是否漏油、齿轮啮合是否正常,以及是否存在异常振动。若发现输出扭矩下降或噪音增大,可能是内部齿轮磨损或轴承损坏,需拆解清洗并更换损坏部件。
3. 传动系统(如同步带、齿轮)的调整
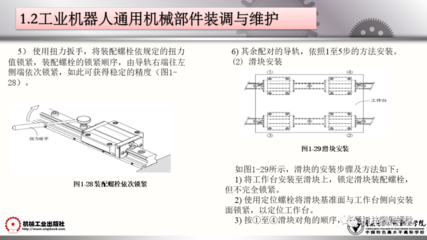
传动系统确保动力从电机传递到机械臂。同步带需检查张紧度,过松会导致打滑,过紧则加速磨损;齿轮传动需关注啮合间隙和齿面磨损。维修时应使用百分表等工具测量间隙,并依据手册标准进行调整或更换。
4. 结构件(连杆、机身)的校准与修复
机器人的连杆和机身可能因碰撞或疲劳产生变形或裂纹。维修时需进行几何精度校准,使用激光跟踪仪等设备检测直线度、平行度。轻微变形可通过调整补偿参数修正,严重时需更换部件并重新进行零点标定。
三、装调流程与安全规范
装调维修不仅涉及技术操作,还需遵循严格流程:首先断电并锁定能源,做好安全防护;其次根据故障现象(如异响、定位漂移)进行系统性诊断;拆卸时记录部件顺序,清洁检查后更换或修复损坏件;最后重新装配,进行空载和负载测试,确保精度和稳定性。安全规范强调个人防护装备(如手套、护目镜)的使用,以及避免在带电或带压状态下操作。
四、案例分析与预防性维护
PPT中通过实际案例(如某型号机器人因轴承润滑不足导致关节卡滞)详解维修步骤。同时强调预防性维护的重要性:定期巡检润滑系统、紧固螺栓、清洁散热部件,并利用振动分析和温度监测预测潜在故障,从而减少意外停机时间。
五、工具与资源推荐
维修通用机械部件需配备基础工具(如扭力扳手、拔轮器)和专用仪器(如振动分析仪、红外热像仪)。建议结合机器人厂商手册和国际标准(如ISO 10218)进行作业,并持续学习新技术,以适应机器人智能化发展趋势。
这100页PPT浓缩了工业机器人机械维修的核心知识,从理论到实践,覆盖了通用零部件的诊断、修复与保养。掌握这些基础,不仅能提升维修效率,还能为机器人长期稳定运行奠定坚实基础。建议读者按章节逐步学习,并结合实操深化理解,真正实现“收藏慢慢看,学以致用”。
如若转载,请注明出处:http://www.cqbjdc.com/product/51.html
更新时间:2026-06-19 20:55:21